Puente H L298N
Puente H L298N
1. ¿Qué es y para que sirve un puente h?
Un puente H o H-bridge es un componente formado por 4 transistores que nos permite invertir el sentido de la corriente, y de esta forma podemos invertir el sentido del giro de motor
Sirve para controlar la velocidad y la dirección de dos mototres de corriente continúa o un motor paso a paso de forma muy sencilla, gracias a los dos H-bridge que monta
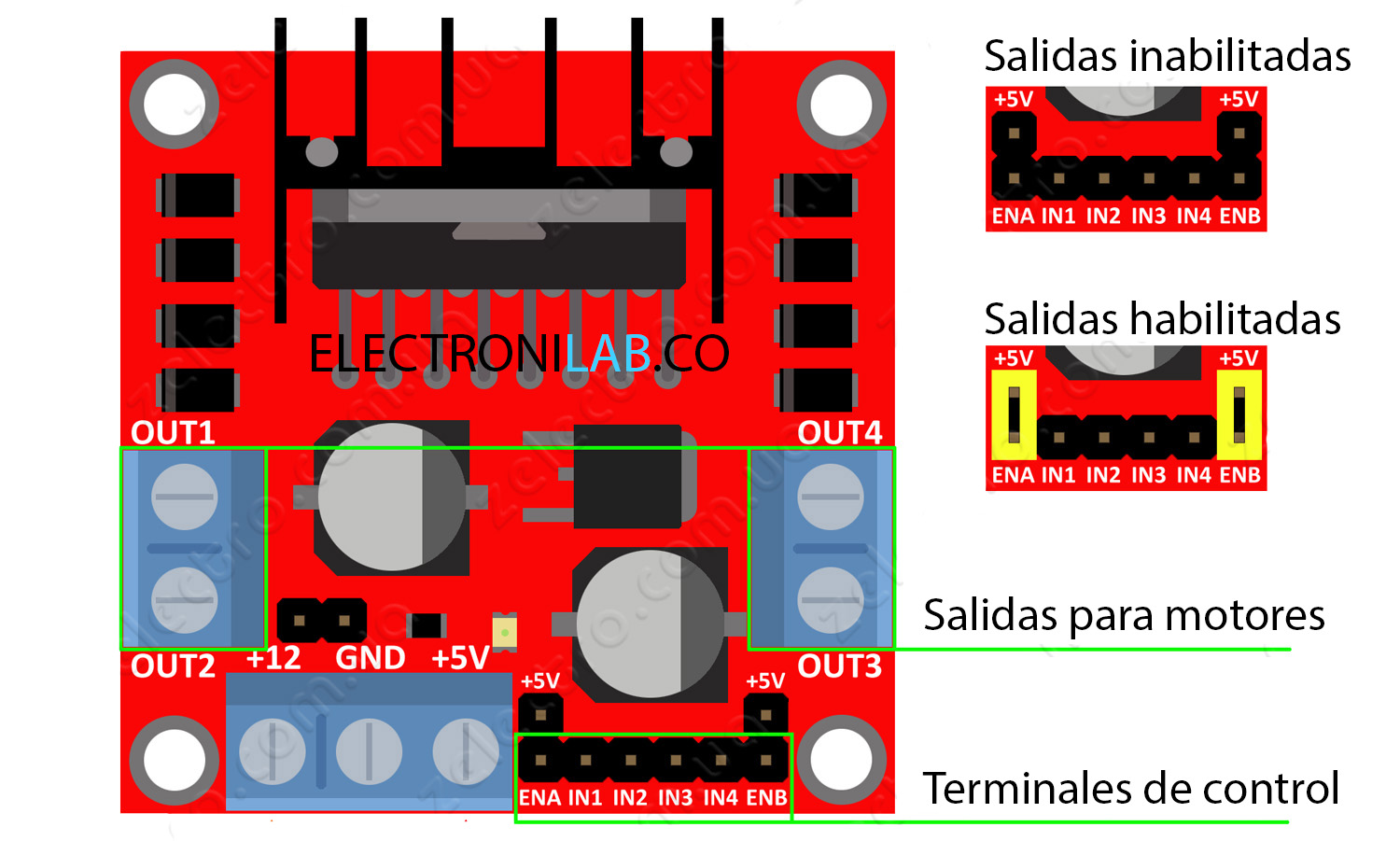
2. ¿Cuáles son las entradas y salidas de un L298N?
Las entradas son las terminales de control, osea, ENA, IN1, IN2, IN3, IN4 y ENB
Las salidas son el motor A y el motor B (OUT1-4)
Así se muestra en la imagen a continuación recuperada de https://electronilab.co/tutoriales/tutorial-de-uso-driver-dual-l298n-para-motores-dc-y-paso-a-paso-con-arduino/
3. ¿Cuál es la conexión de un L298N?
La imagen a continuación fue recuperada de https://naylampmechatronics.com/blog/11_Tutorial-de-Uso-del-M%C3%B3dulo-L298N.html, muestra la conexión de un puente H con su respectiva fuente de alimentación, conectada a un arduino y a un motor

4. ¿Qué es lo que hay que evitar al trabajar con un L298N?
- Tenemos que evitar introducir corriente por V lógico con el jumper de regulación puesto que podríamos dañar el módulo
- Cuando el jumper de selección de 5V se encuentre activo, se recomienda que el consumo no sea mayor a 500 mA
- Poner una tensión mayor a 12V dentro del regulador
- Al utilizar una sola fuente que este conectada a la entrada de 12V, la entrada de 5V no debe estar conectada a ninguna fuente
5. ¿Cuál es el programa Arduino básico para avanzar, retroceder y parar utilizando dos motorreductores conectados a un L298N?
Función para ir hacía adelante a plena potencia
void Adelante ()
{
//Direccion motor A
digitalWrite (IN1, HIGH);
digitalWrite (IN2, LOW);
analogWrite (ENA, 255); //Velocidad motor A
//Direccion motor B
digitalWrite (IN3, HIGH);
digitalWrite (IN4, LOW);
analogWrite (ENB, 255); //Velocidad motor B
}
Función para ir hacía atrás
void Atras ()
{
//Direccion motor A
digitalWrite (IN1, LOW);
digitalWrite (IN2, HIGH);
analogWrite (ENA, 128); //Velocidad motor A
//Direccion motor B
digitalWrite (IN3, LOW);
digitalWrite (IN4, HIGH);
analogWrite (ENB, 128); //Velocidad motor B
}
Función para detenerse o parar
void Parar ()
{
//Direccion motor A
digitalWrite (IN1, LOW);
digitalWrite (IN2, LOW);
analogWrite (ENA, 0); //Velocidad motor A
//Direccion motor B
digitalWrite (IN3, LOW);
digitalWrite (IN4, LOW);
analogWrite (ENB, 0); //Velocidad motor A
}
PROMETEC. (16 de noviembre del 2016). EL MÓDULO CONTROLADOR DE MOTORES L298N. Recuperado de https://www.prometec.net/l298n/
Comentarios
Publicar un comentario